
Odczyt podstawowych wartości z enkoderów Modbus POSITAL FRABA
W tym wpisie zostanie zaprezentowane, jak odczytać podstawowe wartości (pozycja oraz prędkość) z rejestrów enkodera absolutnego POSITAL FRABA z interfejsem Modbus.
KROK 1
Enkoder absolutny POSITAL FRABA podłączono do komputera, wykorzystując konwerter USB-RS485, zgodnie ze schematem poniżej.
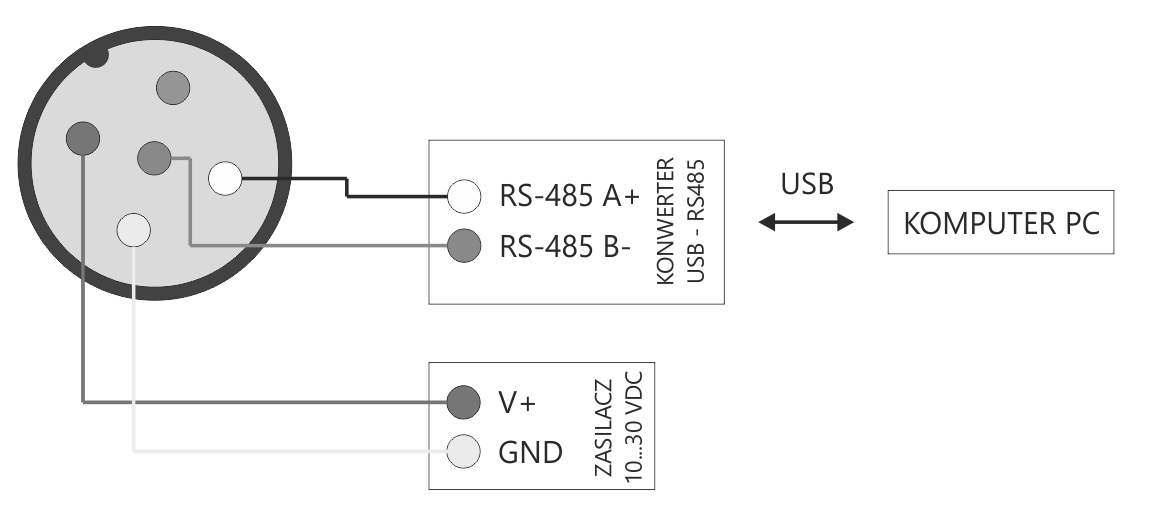
Podłączenie enkoderów absolutnych z interfejsem Modbus ze złączem i przewodem Cx,x-POS-M12-5PIN-F-A-A-SH:
| Rejestr | Opis | Kolejność | Tryb | Uwagi |
| 2 (1*) | Pozycja | MSB | RO | Bity 17-32 |
| 3 (2*) | Pozycja | LSB | RO | Bity 1-16 |
| 6 (7*) | Prędkość | MSB | RO | Bity 17-32 |
| 7 (6*) | Prędkość | LSB | RO | Bity 1-16 |
| 22 (21*) | Preset | MSB | R/W | Bity 17-32 |
| 23 (22*) | Preset | MSB | R/W | Bity 1-16 |
| 37 (36*) | Zapis | – | R/W | Bity 1-16 |
* Dotyczy kodowania zero-base addressing (uwzględniające przesunięcie -1)
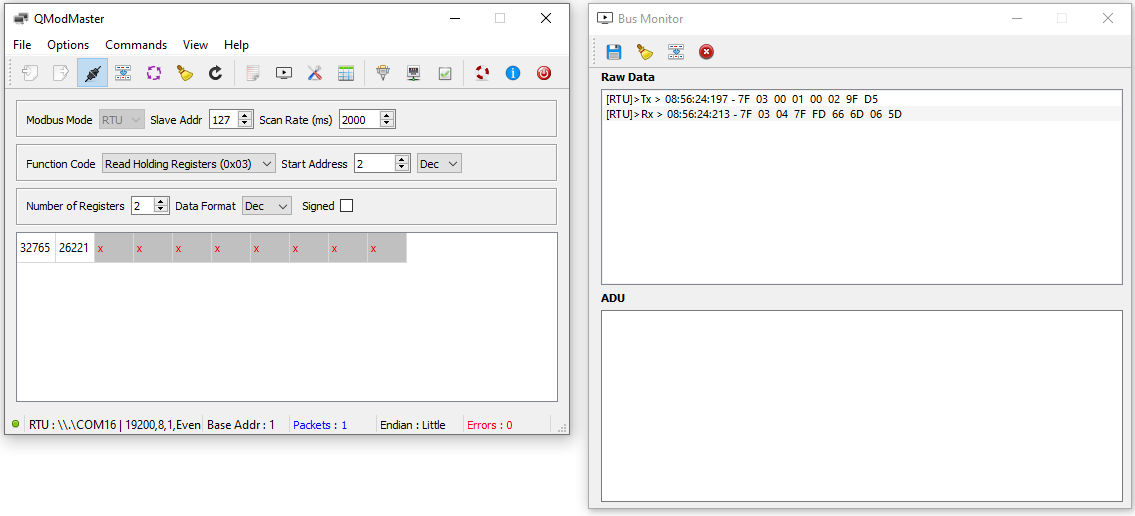
- Odczyt pozycji
Odczyt pozycji enkodera odbywa się poprzez odczytanie przy pomocy funkcji Read Holding Registers (0x03) wartości do rejestrów 2 (1*) i 3(2*).
- Odczyt prędkości
Odczyt prędkości enkodera odbywa się poprzez odczytanie przy pomocy funkcji Read Holding Registers (0x03) wartości do rejestrów 6 (5*) i 7(6*).
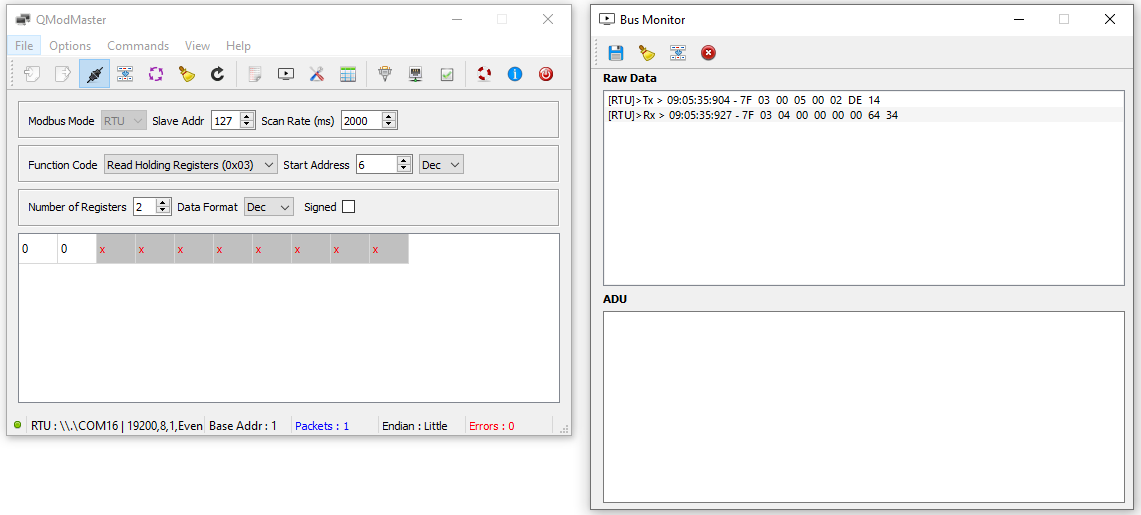
UWAGA: W celu odczytania prędkości należy uprzednio wybrać tryb prędkości. W celu zmiany trybu prędkości należy wpisać do rejestru 27 (26*) odpowiednią wartość (patrz: dokumentacja enkodera). Domyślnie tryb prędkości jest wyłączony.
- Zapis wartości PRESET
Zapis wartości PRESET to pamięci enkodera odbywa się poprzez wpisanie przy pomocy funkcji Write Multiple Registers (0x10) odpowiedniej wartości (Preset, w tym pzypadku wartość 0) do rejestrów 22 (21*) i 23(22*).

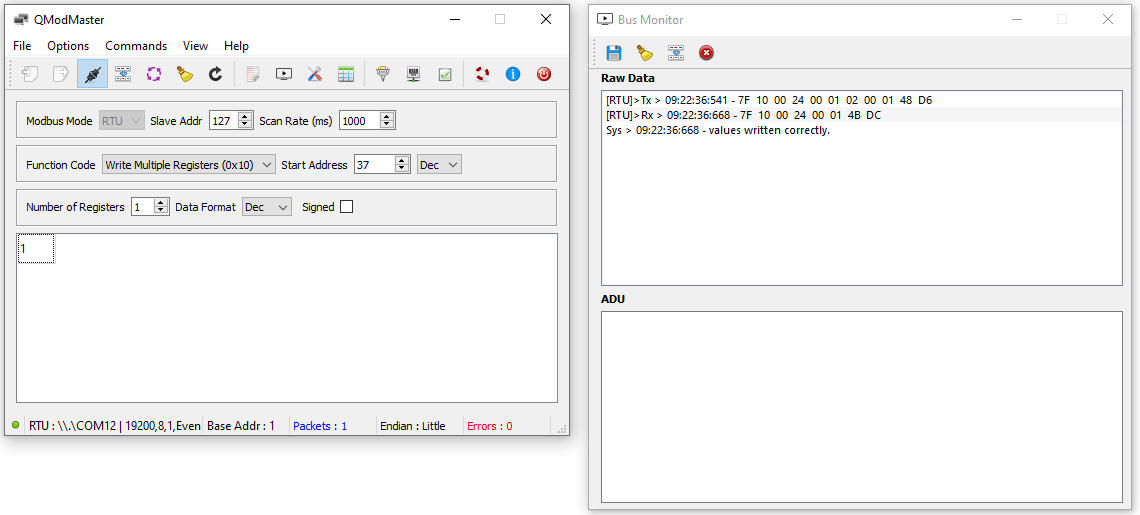
By zmiany zostały utrzymane również po ponownym uruchomieniu zasilania należy wpisać przy pomocy funkcji Write Multiple Registers (0x10) wartości 1 do rejestru 37 (36*)
POWIĄZANE ARTYKUŁY

Enkodery absolutne POSTIAL FRABA z interfejsem Modbus posiadają możliwość konfiguracji parametrów komunikacji zgodnie z wymaganiami Użytkownika. Konfiguracja odbywa się poprzez wypisywanie określonych wartości do wybranych adresów rejestrów Modbus. W tym przykładzie zostanie zaprezentowane, jak zmienić podstawowe parametry transmisji – prędkość transmisji oraz adres urządzenia. KROK 1 Enkoder absolutny POSITAL FRABA podłączono do komputera, wykorzystując konwerter […]











Skalowanie rozdzielczości enkoderów Modbus POSITAL FRABA
W enkoderach absolutnych POSITAL FRABA z interfejsem Modbus (np. UCD-M200B-1213-M100-CRW) istnieje możliwość wyskalowania rozdzielczość. Maksymalna rozdzielczość ST (single-turn) to 16 bitów, natomiast maksymalna rozdzielczość MT (multi-turn) to 15 bitów. W tabeli poniżej przedstawiono podstawowe parametry komunikacji, które umożliwią połączenie enkodera z urządzeniem nadrzędnym (np. komputer PC). Opis Wartość Prędkość transmisji 19200 Adres urządzenia 7Fh (127d) Parzystość […]