
Wszystko co powinieneś wiedzieć o wyjściach enkoderów inkrementalnych POSITAL

W momencie obrotu wału o określony kąt, inkrementalny enkoder obrotowy generuje impuls. Liczba generowanych impulsów przypadająca na obrót, definiowana jest przez rozdzielczość enkodera. Budowa elektroniczna urządzenia jest prostej oraz ekonomicznej budowy. Spowodowane jest tym, że enkodery inkrementalne nie dostarczają informacji o pozycji bezwzględnej. Mają one możliwość pomiaru aktualnej pozycji, a także prędkości kątowej. Pozycja obliczana jest na podstawie pozycji początkowej oraz ilości zliczonych impulsów. Prędkość natomiast, obliczana jest na podstawie ilości zliczonych impulsów w czasie.
Zasada działania
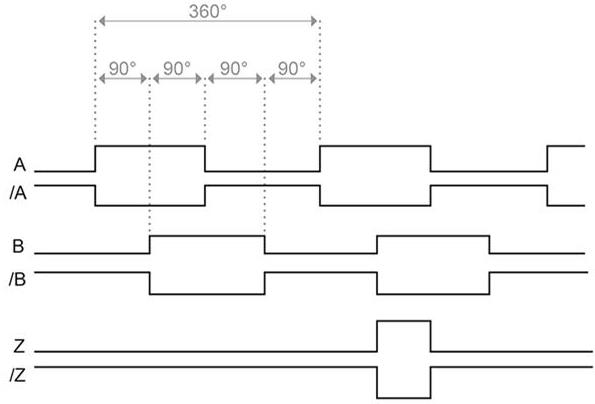
Informacja do enkoderów inkrementalnych dostarczana jest poprzez sygnał szeregowy, dlatego jeden czujnik musi być podłączony do jednego sterownika. Posiadają one przynajmniej jeden kanał wyjściowy „A”, jednakże najczęściej są to przynajmniej dwa kanały „A” oraz „B”, które są przesunięte względem siebie o 90o (możliwe jest określenie kierunku obrotu wału). Jeden z sygnałów zawsze wyprzedza drugi. Ten, który narasta pierwszy określa kierunek obrotu – zgodny bądź przeciwny do ruchu wskazówek zegara).
Część urządzeń wyposażona jest również w sygnał „Z”. Na każdy obrót wału, a więc przepełnienie stosu pamięci wynikającego z rozdzielczości enkodera, na wspomnianym kanale pojawia się logiczna „1″. Pozwala to na zachowanie punktu referencyjnego w tym samym miejscu.
W celu zapewnienia braku błędów w transmisji danych wprowadza się sygnały „/A”, „/B”, „/Z”, które są negacjami kanałów „A”, „B”, „Z”. Jakość transmisji poprawia również zastosowanie do przesyłania danych kabla ze skrętki.
Typowy przebieg sygnału enkodera inkrementalnego
Parametry enkoderów
Najważniejszym parametrem enkoderów jest ich rozdzielczość. Enkoder inkrementalny przesyła ilość impulsów na obrót. Im większa jest liczba impulsów tym mniejszy kąt wywołuje powstanie impulsu. Enkodery firmy Posital Fraba są reprogramowalne, pozwalają w każdej chwili na zmianę rozdzielczości za pomocą programatora UBIFAST. Kolejnym ważnym parametrem jest jego standard wyjścia (interfejs). Najpowszechniejszymi interfejsami w enkoderach inkrementalnych Posital Fraba są wyjścia Push-Pull (HTL) oraz RS422 (TTL). Wyparły one wyjścia napięciowe oraz z otwartym kolektorem NPN i PNP. Obwody w wyjściu Push-Pull (HTL) utrzymują na wyjściu poziom sygnału proporcjonalny do napięcia zasilania. Standardowo wynosi ono od 8 do 30 VDC. Przy odpowiednim podłączeniu można wykorzystać interfejs Push-Pull do zastąpienia układów z otwartym kolektorem. W przypadku układów RS422 (TTL) zapewniają stały sygnał na poziomie 5 V, niezależny od napięcia zasilania. W tym standardzie dostępne są dwa przedziały zasilania: od 4.75 do 5.5 VDC (zastępujące układy z otwartym kolektorem) lub od 8 do 30 VDC. Wyjście to jest w pełni kompatybilne ze standardem RS-422 poprzez różnicowe przesyłanie sygnałów. Zapewnia również najwyższą częstotliwość odpowiedzi układu i doskonałą odporność na zakłócenia.
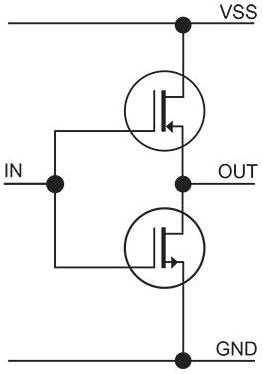
Układ Push-Pull (HTL) |
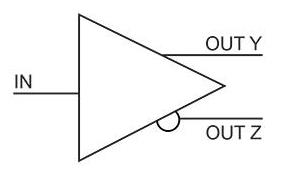
Układ RS-422 (TTL) |
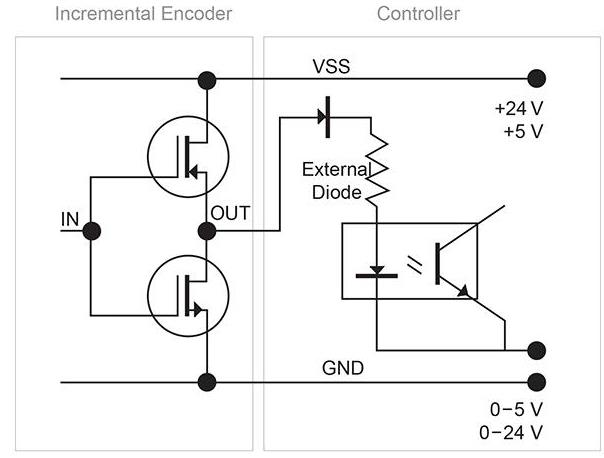
Zastępowanie starszych układów z otwartym kolektorem
Otwarty kolektor PNP |
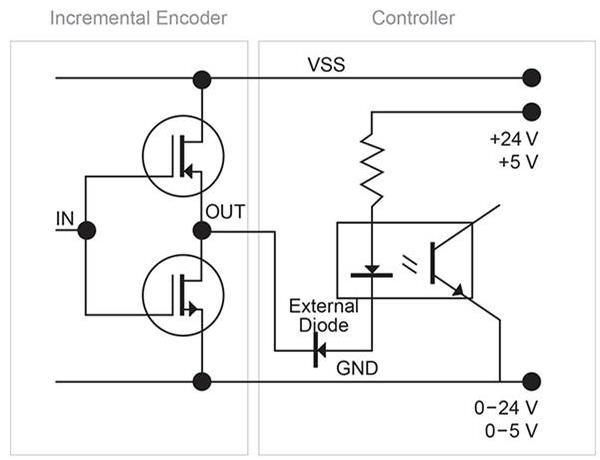
Otwarty kolektor NPN |
Enkodery programowalne
Enkodery inkrementalne dostępne w portfolio Posital Fraba są reprogramowalne, więc w każdej chwili możliwa jest zmiana kluczowych właściwości enkoderów. Parametry, które mogą być modyfikowane to standard wyjścia (Push-Pull (HTL) lub RS422 (TTL)), liczba impulsów na obrót (od 1 do 16384 imp./obr.) oraz kierunek zliczania impulsów. Programowalność to cecha bardzo istotna i ceniona przez dystrybutorów, integratorów systemów oraz projektantów maszyn, ponieważ pozwala na ograniczenie potrzebnej przestrzeni magazynowej. Dzięki niej istnieje możliwość utrzymywania niewielkiej ilości modeli w „standardowych” wariantach mechanicznych i dostosowywanie parametrów do konkretnych aplikacji.











