
Współpraca enkodera POSITAL UCD-M200B-1516 PRM z panelem HMI Weintek

KROK 1 – Połączenie panelu HMI z enkoderem
Na rysunku poniżej przedstawiono schemat podłączenia enkodera UCD-M200B-1516-…-PRM z panelem HMI Weintek (MT807Ip).
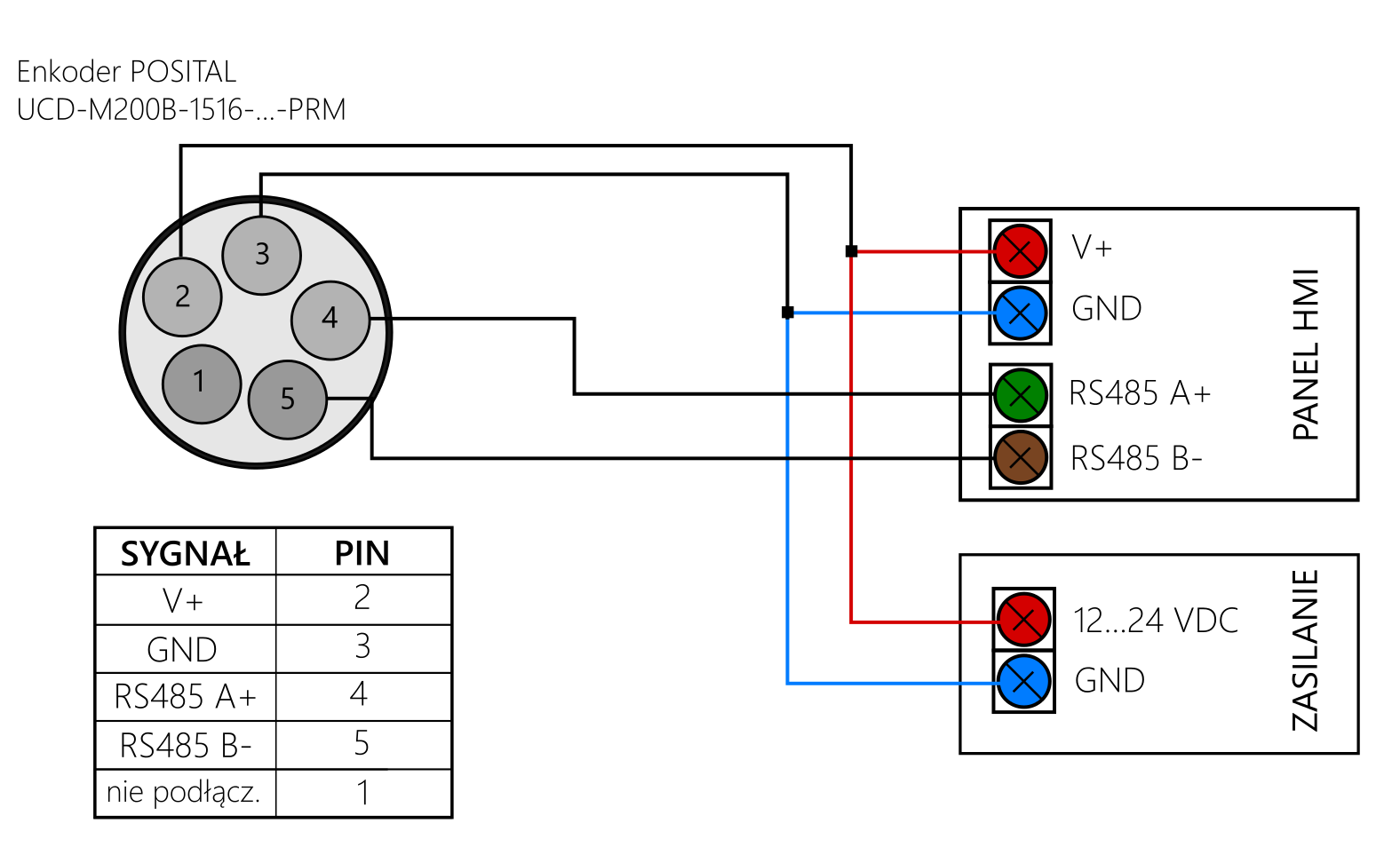
Rys. 1. Schemat podłączenia enkodera do panelu HMI.
Zarówno panel HMI, jak i siłownik mogą zostać zasilone z 24V.
KROK 2 – Konfiguracja panelu z poziomu programu EasyBuilder PRO
Po podłączeniu panelu HMI za pomocą złącza Ethernetowego do komputera (panel HMI oraz karta sieciowa komputera muszą się znajdować w tej samej podsieci) należy utworzyć nowy projekt wybierając z listy model panelu (MT807Ip).
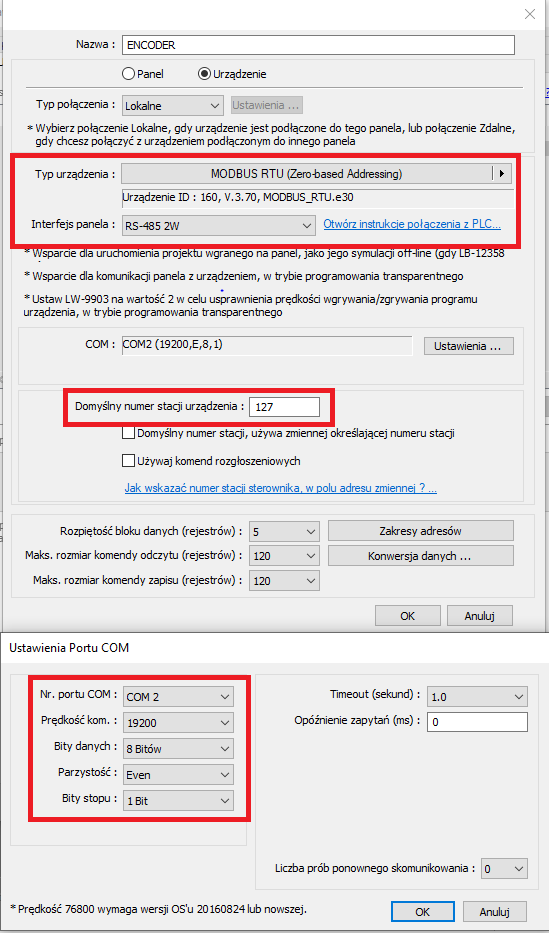
Rys. 2. Konfiguracja komunikacji HMI z enkoderem
Za pomocą złącza RS485 podłączyć sterownik PLC (+ do A; – do B) do panelu HMI (COM2). Konfiguracja połączenia obu urządzeń (na czerwono oznaczono istotniejsze parametry). Ustawienie portu COM – zgodne dla ustawień domyślnych urządzenia pracującego w trybie Slave (enkoder), przedstawiono w tabeli poniżej (Tabela 1).
Tabela 1. Parametry komunikacji – fragment dokumentacji technicznej siłownika.
| Domyślne parametry transmisji | |
| Prędkość transmisji | 19200 |
| Bity danych | 8 |
| Bity stopu | 1 |
| Parzystość | Even |
| Adres urządzenia w sieci | 127 |
KROK 3 – Odczyt i zapis parametrów na panelu HMI
Po wcześniejszym skonfigurowaniu połączenia z wykorzystaniem protokołu Modbus RTU, można przystąpić do przygotowania panelu HMI do wyświetlana lub wprowadzania parametrów. Wyświetlanie i wprowadzanie wartości realizowane jest na panelu HMI poprzez Obiekt Numeryczny, który należy dodać oraz skonfigurować za pomocą programu EasyBuiler Pro (Obiekty->Wprowadzanie->Numeryczne). W tabeli poniżej (Tabela 2) przedstawiono zestawienie wybranych adresów rejestrów Modbus.
| Adres rejestru | Opis | Tryb | Wartość domyślna |
| 1DEC | Pozycja (MSB, bity 17-32) | Odczyt | – |
| 2DEC | Pozycja (LSB, bity 1-16) | Odczyt | – |
| 5DEC | Prędkość (MSB, bity 17-32) | Odczyt | – |
| 6DEC | Prędkość (LSB, bity 1-16) | Odczyt | – |
| 21DEC | Funkcja Preset | Odczyt/Zapis | 0 – Preset |
| 25DEC | Kierunek zliczania impulsów: 0 – CW 1 – CCW |
Odczyt/Zapis | 0 – CW |
| 26DEC | Tryb prędkości: 0 – wyłączony 1 – rpm (obroty na minutę) 2 – stopnie/s 3 – kroki/s 4 – rad/s 5 – Hz |
Odczyt/Zapis | 0 – wyłączony |
| 36DEC | Zapis parametrów | Odczyt/Zapis | – |
Do odczytu parametrów należy wykorzystać funkcję Modbus RTU – Read holding register (0x03).
- Odczyt pozycji – konfiguracja Obiektu Numerycznego

Rys. 3. Konfiguracja obiektu numerycznego – odczyt aktualnej pozycji enkodera
Adres dla odczytu aktualnej pozycji, to zgodnie z Tabelą 2 – 50001, dlatego jako adres odczytu ustawiono 5×1.
Należy zwrócić również uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. W przypadku odczytu pozycji z enkodera, format danych to 32-bit Całk. Bez znaku (pozycja przechowywana jest na dwóch 16-bitowych rejestrach – 50001 oraz 50002).

Rys. 4. Konfiguracja obiektu numerycznego – odczyt aktualnej pozycji enkodera
- Odczyt prędkości – konfiguracja Obiektu Numerycznego
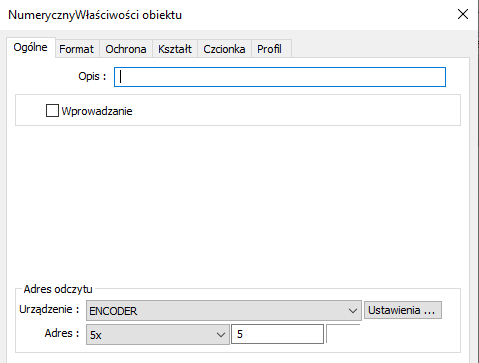
Rys. 5. Konfiguracja obiektu numerycznego – odczyt prędkości
Adres dla odczytu prędkości, to zgodnie z Tabelą 2 – 50005, dlatego jako adres odczytu ustawiono 5×5.
Należy zwrócić również uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. W przypadku odczytu pozycji z enkodera, format danych to 32-bit Całk. Bez znaku (pozycja przechowywana jest na dwóch 16-bitowych rejestrach – 50005 oraz 50006)

Rys. 6. Konfiguracja obiektu numerycznego – odczyt prędkości enkodera
- Funkcja Preset – konfiguracja obiektu Ustaw Rejestr
Załączanie funkcji Preset (ustawienie aktualnej pozycji na wartość Preset) odbywa się poprzez wpisanie do rejestrów 40021 (4×21) oraz 40022 (4×22) wartości Preset. W tym przykładzie wartość Preset wynosi 0.
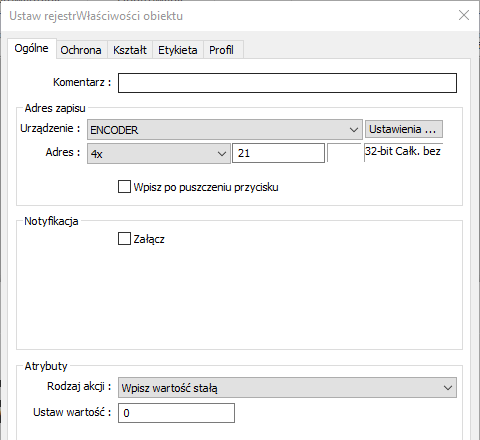
Rys. 7. Konfiguracja obiektu Ustaw Rejestr – Funkcja Preset
- Zapis aktualnej pozycji – konfiguracja obiektu Ustaw Rejestr
Zapis aktualnej pozycji enkodera do pamięci odbywa się poprzez wpisanie do rejestru 40036 (4×36) wartości 1.
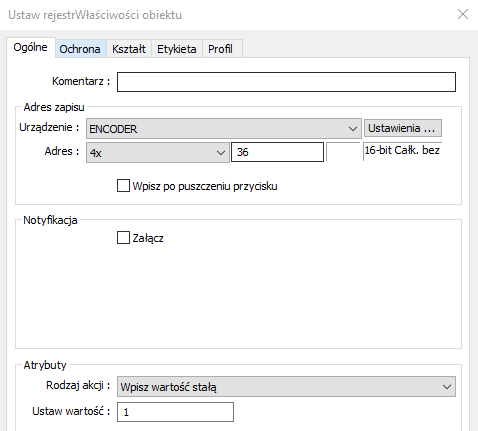
Rys. 8. Konfiguracja obiektu Ustaw Rejestr – Funkcja Preset
- Wybór trybu prędkości – konfiguracja obiektu Lista Opcji
Wybór trybu prędkości odbywa się poprzez wpisanie do rejestru 40026 (4×26) odpowiedniej wartości, do której przypisany jest dany tryb prędkości (patrz Tabela 2).
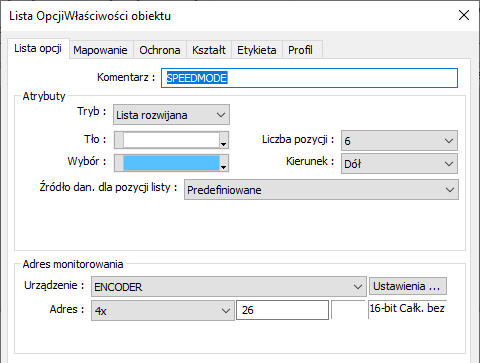
Rys. 9. Konfiguracja obiektu Lista Opcji – Wybór trybu prędkości
Następnie należy odpowiednio zmapować wartości i pozycje na liście opcji, zgodnie z rysunkiem poniżej:
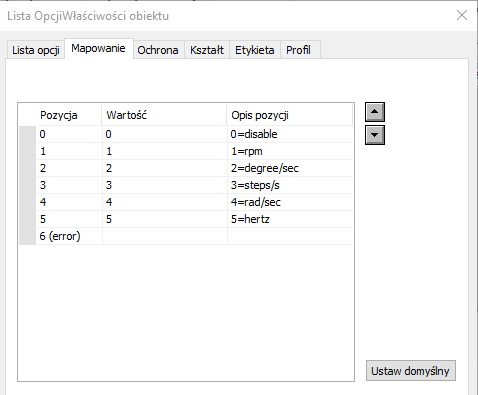
Rys. 10. Konfiguracja obiektu Lista Opcji – mapowanie wartości
- Wybór kierunku zliczania impulsów – konfiguracja obiektu Lista Opcji
Wybór kierunku zliczania impulsów odbywa się poprzez wpisanie do rejestru 40025 (4×25) odpowiedniej wartości, do której przypisany jest dany kierunek zliczania impulsów (patrz Tabela 2).
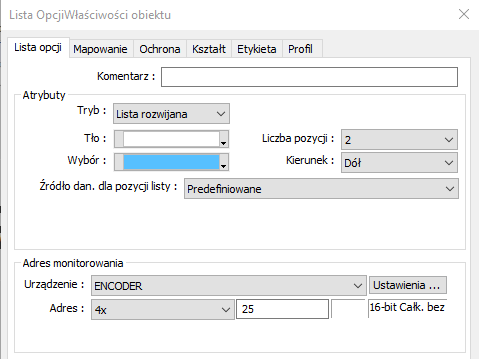
Rys. 11. Konfiguracja obiektu Lista Opcji – Wybór kierunku zliczania impulsów
Następnie należy odpowiednio zmapować wartości i pozycje na liście opcji, zgodnie z rysunkiem poniżej:
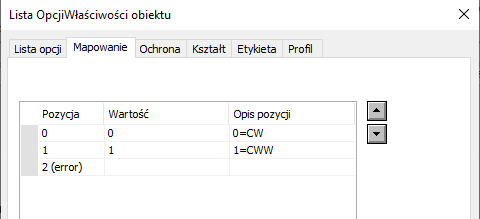
Rys. 12. Konfiguracja obiektu Lista Opcji – mapowanie wartości
Na rysunku poniżej przedstawiono propozycję rozmieszczenia elementów na ekranie panelu HMI
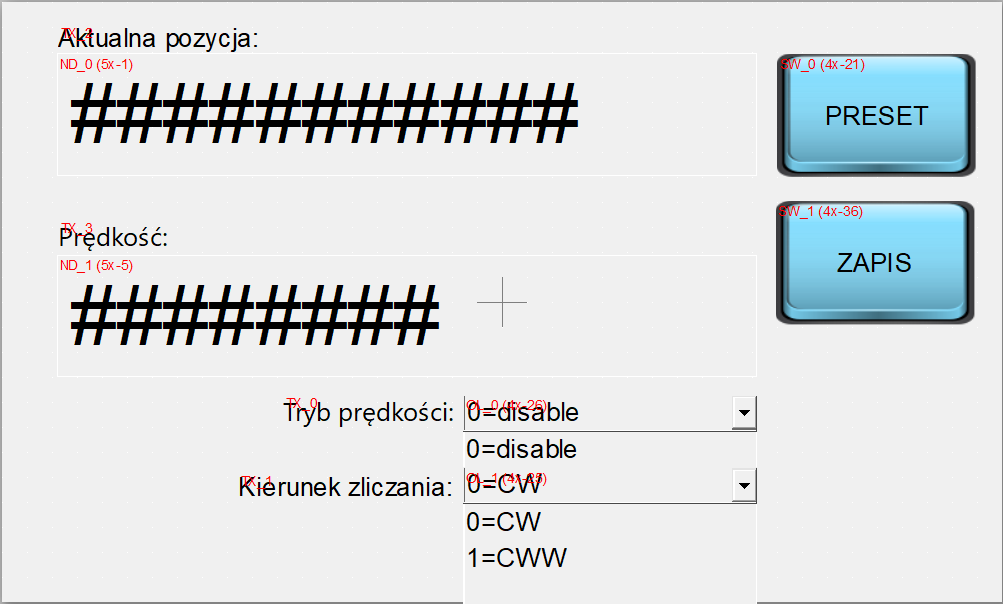
Rys. 5.Propozycja rozmieszczenia obiektów na ekranie HMI.
PODSUMOWANIE
Ten tutorial miał na celu pokazanie jak w kilku krokach łatwo i szybko skonfigurować panel HMI firmy Weintek do współpracy z enkoderem Posital UCD-M200B-1516-…-PRM. Jeśli napotkali Państwo jakieś problemu lub coś jest niejasne, prosimy o kontakt z naszymi specjalistami pod mailem: biuro@apautomatyka.pl
Pliki do pobrania:





