
Współpraca enkodera absolutnego SSI firmy Posital Fraba z serii UCD-S101X ze wskaźnikiem DiMod-P-A1 oraz panelem HMI Weintek

KROK 1 – Konfiguracja wskaźnika DiMod-P-A1 do współpracy z enkoderem
DiMod-P-A1 to programowalny wskaźnik dedykowany do pracy z czujnikami posiadającymi interfejs cyfrowy SSI (np. enkodery absolutne). Urządzenie wyposażone jest w interfejs sieciowy RS-485 z Modbus RTU, pozwalającym na komunikację licznika z panelem HMI, sterownikiem PLC lub komputerem PC.
Podłączenie enkodera ze wskaźnikiem: Enkoder podłączono do wskaźnika zgodnie ze schematem przedstawionym poniżej:

Konfiguracja wskaźnika DiMod-P-A1: Do prawidłowego odczytu wskazań enkodera na wskaźniku, należy odpowiednio go skonfigurować. Aby wejść do menu należy przytrzymać przycisk ENT przez minimum 5 sekund. Do poruszania się pomiędzy kolejnymi pozycjami menu wykorzystywany jest przycisk NEXT1. Aby zmienić wybrany parametr należy nacisnąć przycisk ENT, a następnie nawigując za pomocą przycisku NEXT1 można zmieniać wartości parametrów za pomocą przycisku NEXT2. Zatwierdzenie zmiany parametru dokonuje się przyciskiem ENT. Menu można opuścić wykorzystując przycisk ESC/RST. Lista podstawowych parametrów istotnych do konfiguracji z enkoderem:
| MENU | OPIS |
 |
Kodowanie SSI: 1- kodowanie binarne 2- kodowanie Graya |
 |
Współczynnik (mnożnik) służący do przeliczania pozycji. Aby wyświetlić pozycję kątową [o], wartość współczynnika należy ustawić na 360. |
 |
Kierunek zliczania: 1- zgodnie z ruchem wskazówek zegara 2- przeciwnie do ruchu wskazówek zegara |
 |
Liczba bitów na jeden obrót (rozdzielczość) – ST Zakres 0…20 bit Wartość zgodna z zaprogramowaną wartością enkodera. |
 |
Liczba bitów na jeden obrót (liczba obrotów) – MT Zakres 0…20 bit Wartość zgodna z zaprogramowaną wartością enkodera. |
 |
Częstotliwość dla interfejsu SSI – odstęp miedzy pomiarami Zakres 1…1000 ms |
Po prawidłowym skonfigurowaniu wskaźnika powinien on pokazywać pozycję, a po naciśnięciu przycisku NETX1 – prędkość.
KROK 2 – Wyświetlanie pozycji i prędkości na panelu HMI
Wyświetlanie odczytów z enkodera na panelu HMI odbywa się pośrednio, poprzez wskaźnik DiMod-P-A1, który wyposażony jest w interfejs RS485 z protokołem MODBUS RTU, który umożliwia komunikację licznika z panelem HMI.
Podłączenie enkodera z panelem HMI: Panel HMI podłączono do wskaźnika DiMod zgodnie ze schematem przedstawionym poniżej:

Konfiguracja panelu z poziomu programu EasyBuilder PRO: Po podłączeniu panelu HMI za pomocą złącza Ethernetowego do komputera należy utworzyć nowy projekt wybierając z listy model panelu (MT807Ip).
  |
Za pomocą złącza RS485 podłączyć wskaźnik ( + do A; – do B) do panelu HMI (COM2). Konfiguracja połączenia obu urządzeń (na czerwono oznaczono istotniejsze parametry). Ustawienie portu COM: |
- Prędkość transmisji: domyślnie 9600bps
- Bity danych: 8 bitów
- Parzystość: brak
- Bity stopu: 1 bit
Odczyt pozycji i prędkości na panelu HMI: Po wcześniejszym skonfigurowaniu połączenia z wykorzystaniem protokołu Modbus RTU, można przystąpić do wyświetlania parametrów na panelu HMI. Wyświetlanie wartości realizowane jest na panelu HMI poprzez Obiekt Numeryczny, który należy dodać oraz skonfigurować za pomocą programu EasyBuiler Pro (Obiekty>Wprowadzanie->Numeryczne).
- Odczyt pozycji
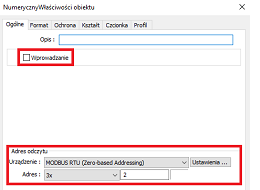 |
W przypadku odczytu, Wprowadzenie należy odznaczyć. Wybrano odpowiedni rejestr (adres) odczytu, zgodny z dokumentacją wskaźnika DiMod-P-A1: 3×2. 3 – numer portu 2 – numer rejestru (wartość przy R) |
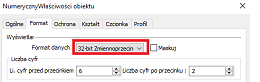 |
Należy zwrócić uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. |
- Odczyt prędkości
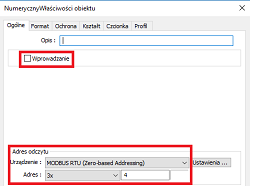 |
W przypadku odczytu, Wprowadzenie należy odznaczyć. Wybrano odpowiedni rejestr (adres) odczytu, zgodny z dokumentacją wskaźnika DiMod-P-A1: 3×4. 3 – numer portu 4 – numer rejestru (wartość przy R) |
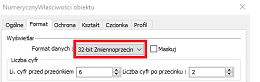 |
Należy zwrócić uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. |
KROK 3 – Wyświetlanie pozycji pojedynczego obrotu oraz numeru obrotu na panelu HMI – makro
Tworzenie makro zostanie opisane pod kątem poniższego przykładu. Aby dodać nowe makro, należy przyjść do Projekt->Biblioteki->Makra, po utworzeniu makra, zostanie otwarte Okno edycji Makra.

Wybrano Wykonywanie cykliczne, zatem makro będzie wykonywało się cyklicznie z określonym interwałem czasowym.
Podstawowe funkcje makra:
- Odczyt danych – GetData(dane_wej, nazwa_urządzenia, adres_funkcji, adres_rejestru, 1) przykładowo: GetData(pozycja,”MODBUS RTU (Zero-based Addressing)”,3x,2,1) – dane przychodzące z rejestru 3×2 przez MODBUS RTU przechowywane są jako zmienna pozycja,
- Zapis danych – SetData(dane_wyj, nazwa_urządzenia, adres_funkcji, adres rejestru, 1) przykładowo: SetData(x, „Local HMI”, LW,100,1) – dane określone zmienną x wysyłane są do rejestru LW100 urządzenia Local HMI.
Makro obliczające wartości pozycji pojedynczego obrotu oraz numer obrotu przedstawiono poniżej:  Wyświetlanie zmiennych na panelu HMI zapisanych w odpowiednich rejestrach jest realizowane (podobnie jak w przypadku wyświetlania pozycji i prędkości) za pomocą Obiektów Numerycznych.
Wyświetlanie zmiennych na panelu HMI zapisanych w odpowiednich rejestrach jest realizowane (podobnie jak w przypadku wyświetlania pozycji i prędkości) za pomocą Obiektów Numerycznych.
- Wyświetlanie pozycji pojedynczego obrotu (0…360o)
 |
W przypadku odczytu, Wprowadzenie należy odznaczyć. Wybrano odpowiedni adres odczytu – rejestr do którego zapisano zmienną x w makro: LW100. |
 |
Należy zwrócić uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. |
- Wyświetlanie numeru obrotu
 |
W przypadku odczytu, Wprowadzenie należy odznaczyć. Wybrano odpowiedni adres odczytu – rejestr do którego zapisano zmienną i w makro: LW102. |
 |
Należy zwrócić uwagę na zakres parametru, format danych przesyłanych przez czujnik oraz dostosować liczbę cyfr przed i po przecinku. |
PODSUMOWANIE Ten tutorial miał na celu pokazanie jak skonfigurować wskaźnik DiMod-P oraz jak podłączyć enkoder SSI do panelu HMI. Jeśli napotkali Państwo jakieś problemy lub coś jest niejasne, prosimy o kontakt z naszymi specjalistami pod mailem: biuro@apautomatyka.pl
Pliki do pobrania:





