
Czujniki POSITAL w mobilnych robotach bezzałogowych

W ostatnich latach obserwuje się znaczący wzrost popularności robotów typu AGV (z ang. Automated Guided Vehicles) oraz RGV (z ang. Rail Guided Vehicles). Roboty tego typu są zazwyczaj stosowane w zakładach produkcyjno-montażowych i centrach logistycznych, w których realizowane są powtarzalne zadania dostawy elementów lub materiałów po określonej trasie. Wraz ze wzrostem wymagań dotyczących wydajności następuje dynamiczny rozwój urządzeń typu AMR (z ang. Autonomous Mobile Robot), które wykonują zadaną pracę jeszcze sprawniej i wydajniej niż poprzednicy, czyli roboty z grupy AGV i RGV. Co naturalne roboty tego typu wymagają precyzyjnych narzędzi pomiarowych, w tym czujników pozycji kątowej i liniowej oraz czujników przechylenia, które pozwalają na szybkie i bezpieczne poruszanie się w strefie roboczej.
Czujniki pozycji firmy POSITAL, w tym enkodery i inklinometry, wyróżnia wytrzymałość, kompaktowa konstrukcja, możliwość bezbateryjnego zliczania impulsów. POSITAL nie tylko dostarcza zaawansowane rozwiązania czujnikowe na rynek zautomatyzowanych pojazdów i robotów, ale także wykorzystuje własne produkty w swoich zakładach produkcyjnych.
| Systemy sterowania | Pomiar pozycji absolutnej
Wysoka rozdzielczość i dynamika odpowiedzi Dostępne kilka wariantów mechanicznych Dostępne wykonania bezpieczne |
| Systemy jezdne | Solidna i kompaktowa konstrukcja
Kontrola prędkości Dostępne wykonania bezpieczne |
| Systemy z manipulatorem | Dostępne kilka wariantów (elektronika, mechanika, interfejsy)
Kontrola przechylenia Solidna i kompaktowa konstrukcja |
Systemy sterowania
Roboty AGV oraz AMR muszą nie tylko dotrzeć do określonego celu w zakładzie, ale także unikać przeszkód, które mogą pojawić się na ich ścieżce. Chociaż preferowanym, ze względu na niezawodności i dokładność, rozwiązaniem jest pomiar z wykorzystaniem czujników pozycji absolutnej, to w wielu przypadkach montaż mechaniczny takich urządzeń w systemach sterowania może okazać się sporym wyzwaniem. Niezależnie od tego, czy jest to nowy projekt układu sterującego, czy modernizacja istniejącego systemu, enkodery (również enkodery typu KIT) firmy Posital zapewniają znakomitą wydajność i dokładność, a dodatkową zaletą jest możliwość wyboru właściwego rozwiązania spośród ponad miliona wariantów wykonania.
 |
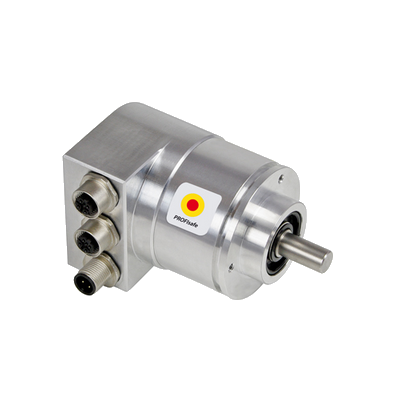
Enkodery inkrementalne POSITAL
Rozdzielczość do 16 bitów Wysokie dopuszczalne obciążenie wału (do 300 N) Stopień ochrony do IP69K, odporność na słoną wodę |
 |
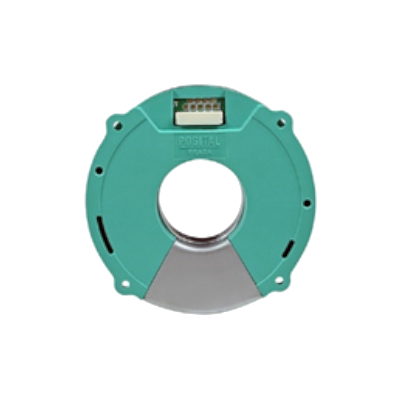
Rozwiązanie z otworem montażowym
Średnica otworu do 40 mm Stosowane w enkoderach absolutnych i inkrementalnych |
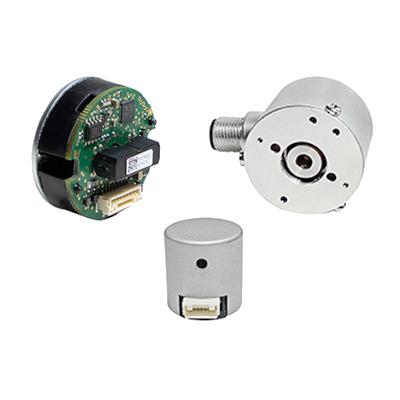 |
Enkodery Kit POSITAL
Rozwiązanie bezbateryjne i bez przekładni mechanicznej Rozdzielczość ST do 17 bit Miniaturowe wykonanie: średnica 36 lub tylko 22 mm |
 |
Enkodery Kit POSITAL
Rozwiązanie bezbateryjne i bez przekładni mechanicznej Rozdzielczość ST do 19 bit, dokładność ± 0.02 Miniaturowe wymiary: tylko 18 mm wysokości |
 |
Enkodery redundantne POSITAL
Niewielkie wymiary i atrakcyjna cena Szeroki wybór wariantów mechanicznych Zgodność z normami PL d, Cat. 3 of ISO 13849 |
Systemy jezdne
Podobnie jak w przypadku systemów sterowania, systemy napędowe robotów AGV i AMR zwykle mają podobne wymagania mechaniczne i elektryczne dotyczące urządzeń pomiarowych (np. enkoderów). Coraz częściej stosuje się systemy bezpieczeństwa z wykorzystaniem sygnału zwrotnego z układu napędowego, zwłaszcza gdy na planowanej trasie robota może pojawić się człowiek.
 |
Enkodery Kit POSITAL
Bezbateryjne, bez przekładni, wieloobrotowe Rozdzielczość ST do 17 bit Temperatur pracy: -40° to +105°C |
|
Niewielkie wymiary i atrakcyjna cena Szeroki wybór wariantów mechanicznych Zgodność z normami PL d, Cat. 3 of ISO 13849 |
Systemy z manipulatorem
Innym rodzajem pojazdu należącego do grupy robotów AGV/AMR są podesty ruchome, przeznaczone do wykonywania zadań związanych z transportem, podnoszeniem i paletyzacją. W tego typu układach stosowane są przede wszystkim enkodery linkowe oraz inklinometry. Enkodery linkowe mierzą pozycję wybranych elementów robota w trakcie podnoszenia, podczas gdy inklinometry kontrolują nachylenie platformy.
 |
Enkodery linkowe POSITAL
Wysoka dokładność Możliwość programowania przez użytkownika Różne warianty wykonania Najpopularniejsze w automatyce interfejsy |
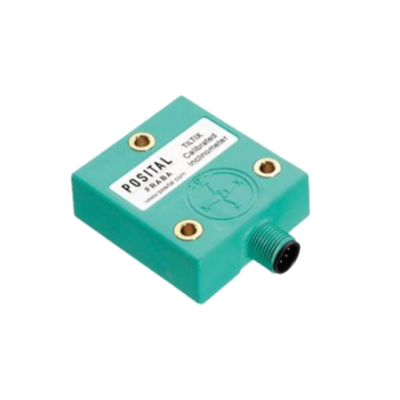 |
Inklinometry POSITAL
Kompaktowa obudowa Wysoka dokładność 0.1° i rozdzielczość 0.01° Zakres pomiarowy: ±80° (2 osie) lub 360° (1 oś) Różne interfejsy Stopień ochrony: IP67, IP68, IP69K |





